Development of simulation scenarios for testing self driving cars
Development of simulation scenarios for testing self driving cars
Published on December 01, 2021 by Nico Vergeiner
thesis post
Abstract
The technology behind autonomous driving has seen a rapid improvement in the last years. It mostly builds on Artificial Intelligence (AI). But there is a fundamental difference between normalprogramming and programming of AI. The goal of this thesis is to build and test a tool that can be used as the foundation of a learning platform. The platform should be able to simulate robots and sensors realistically. You should be able to train robots with Machine Learning (ML) to complete tasks autonomously.
For this task different characteristics that the simulator has to fulfill where defined. In regards to this characteristics the open source simulators Carla, Gazebo and SVL where compared. After multiple evaluations and revising it has shown that the Gazebo simulator is most suited for our case.
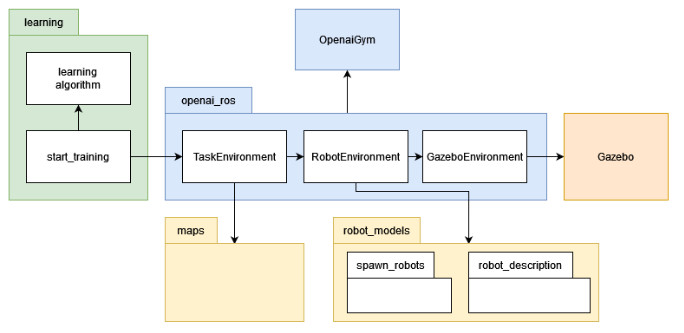
To get a better understanding of the tool the used software components will be looked at. By using Robot Operating System (ROS) it is possible to switch between the simulation and a real robot without puting to much effort into it. Gazebo is an open source 3D robot simulator which we will use based on our evaluation. Gym Gym is a toolkit for developing and comparing reinforcement learning algorithms.
By combining Gazebo with OpenAI the gazebo openai tool was developed. It is a structure of packages that is build on the openai ros packet from TheConstruct. It provides a common structure for organizing everything that is needed to create your robot training from zero, requiring very little implementation. The structure and usage as well as the interactions of the individual components of the tool are explained.
To be able to use the tool as the base of a learning platform it will be shown how to change and expand the tool.
In the end two tasks will be implemented. The first task is to let a robot drive around a track where it has to stay between the lines on the ground. The second task is to recognise a traffic light and the robot has to stop when it is red and to drive when it is green.